
To run a simple navigation/exploration demo of an unknown map there is a pretty stable SLAM implementation known as Hector Slam. You can run hector SLAM with hector navigation package for autonomous driving. The package looks for unexplored frontiers and sends the robot to explore that area.
You can find the code for Hector navigation on github.
To run hector SLAM with autonomous driving here are the steps:
- Clone the repo.
git clone https://github.com/tu-darmstadt-ros-pkg/hector_navigation.git
- Create a workspace for e.g. catkin_ws and put the contents in the src folder. Then run:
catkin_make
- Now activate your bot with sensors. For example for a Lizi Robot you do something like:
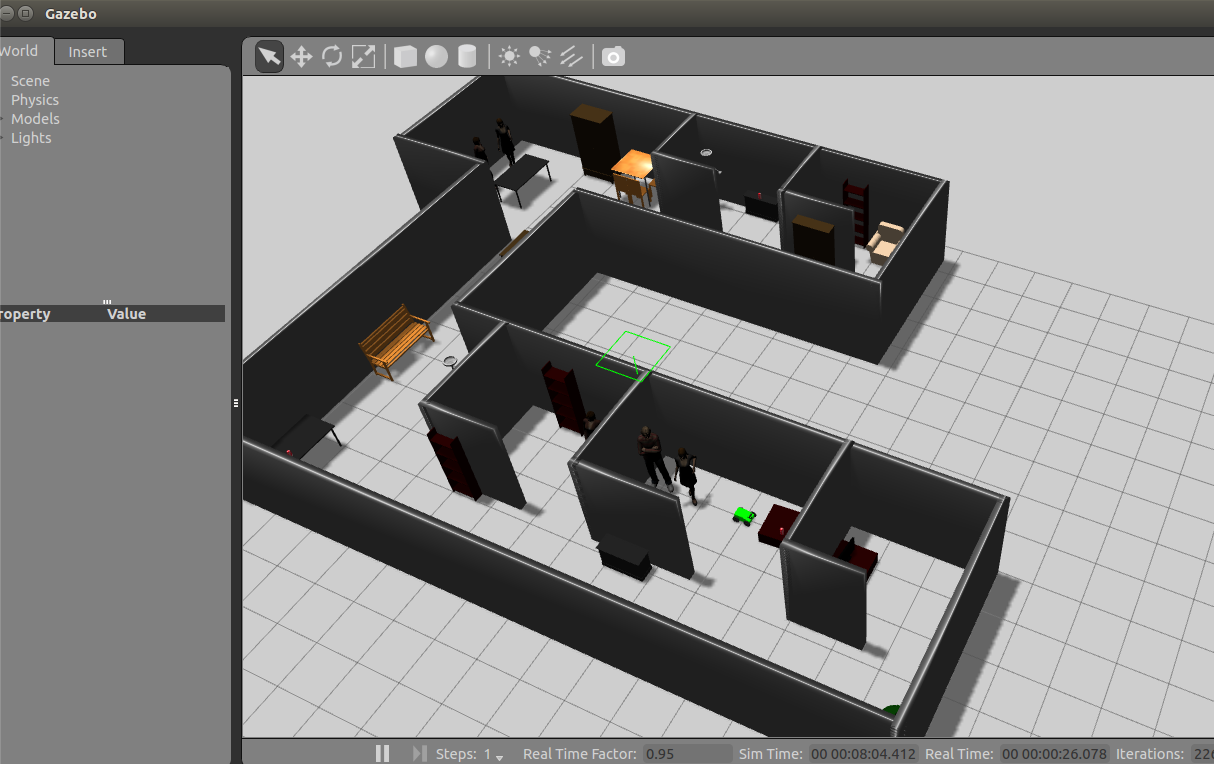
roslaunch robotican_lizi lizi.launch hector_slam:=true move_base:=true lidar:=true world_name:="`rospack find robotican_common`/worlds/building.sdf" gazebo:=true
A gazebo window with the robot and map would open up.

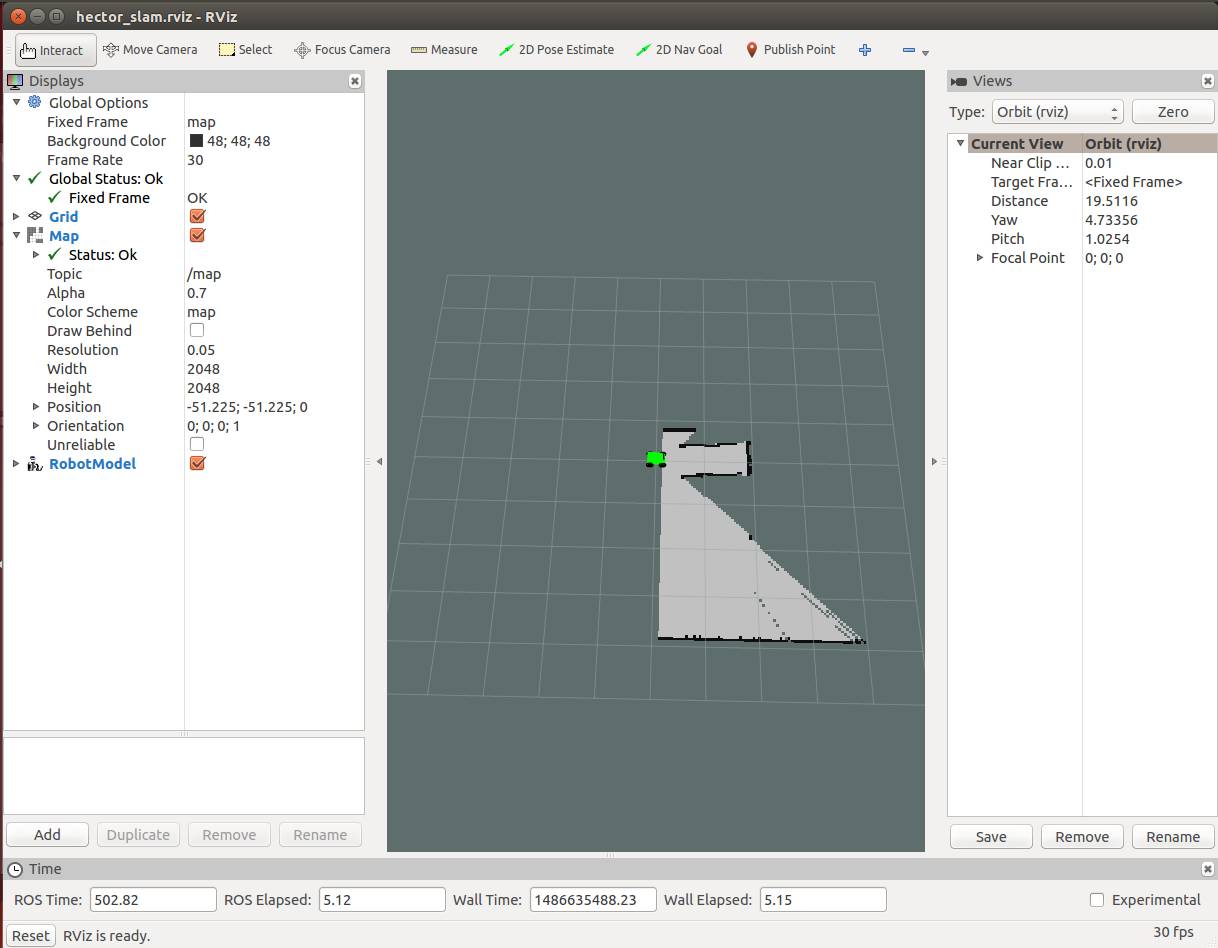
- Now fire up Rviz:
rosrun rviz rviz -d `rospack find robotican_demos`/nfig/hector_slam.rviz
- Finally run the hector exploration node followed by the hector exploration controller.
roslaunch hector_exploration_node exploration_planner.launch
rosrun hector_exploration_controller simple_exploration_controller
You should now have your bot navigating and building the map for you.